Volando nuevas rutas submarinas

Imágenes: Modus Seabed Intervention

Imágenes: Modus Seabed Intervention

Imágenes: Modus Seabed Intervention
Modus Seabed Intervention Limited, con sede en el noreste de Inglaterra, es una empresa relativamente pequeña, pero sus objetivos son ambiciosos y específicos. Informes de Elaine Maslin.
Después de cuatro años de desarrollo de un AUV / ROV híbrido (HAUV) basado en un sistema Saab Sabertooth AUV modificado, Modus Seabed Intervention ahora ha comprado su segundo Sabertooth de aguas profundas, que se entregará este verano.
La adquisición de su último Sabertooth con una calificación de 3.000 m permitirá a la compañía continuar desarrollando su trayectoria y ofrecer vehículos con inteligencia artificial mejorada y capacidades de autonomía.
La visión de la compañía es que sus HAUV operen dentro del campo en los sitios de petróleo y gas y renovables en alta mar, incluidos los parques eólicos, independientemente de los buques de servicio. Esto podría ser a través de un sistema de despliegue en la superficie o a través de un garaje / estación de acoplamiento submarino, en el que el vehículo puede "volar" hacia adentro y hacia afuera. Desde las instalaciones de acoplamiento, el vehículo puede operar como un AUV (sin atadura), usando baterías a bordo, o, donde se requiere control directo, puede operar como un ROV a través de una atadura de fibra óptica (que permite excursiones muy largas), o mediante un control umbilical pleno poder y control.
En lugar de desplegarse desde una embarcación de apoyo dedicada, la estación de acoplamiento está diseñada para desplegarse en el fondo marino desde una grúa de embarcación. El objetivo es utilizar un barco ya comprometido en una ubicación específica, como un barco de suministro, DSV o un barco de servicio de energías renovables en alta mar. El HAUV puede entonces realizar una inspección y / o encuesta independientemente, en sinergia con la actividad principal del barco, reduciendo los costos. El HAUV volverá a su base al finalizar el alcance del trabajo y esperará a que se recupere en un momento conveniente. "Por ejemplo, si ha contratado a un barco para realizar una ejecución de suministro de la plataforma, puede dejar el HAUV al salir y luego recogerlo en el camino de regreso después de que haya completado su tarea predeterminada", dice Nigel Ward, Modus ' Director Comercial. Sobre la base de la capacidad de la batería del actual HAUV de Modus, los levantamientos que cubren unos 60 km pueden ejecutarse con una sola carga autónoma, y el tiempo de levantamiento depende de la velocidad y la carga útil.
Los antecedentes de Modus son los servicios de zanjas submarinas. Cuando la compañía buscaba invertir en nueva tecnología, sintió que el mercado de ROV estaba maduro, si no estaba saturado, por lo que Modus buscó diversificar y adquirió un AUV Remus con el fin de proporcionar servicios de inspección y inspección de menor costo de los buques que ya estaban trabajando fuera La intención era llevar a cuestas las embarcaciones y dejar que el Remus se disparara y realizar su trabajo mientras la embarcación continuaba con su tarea principal (en lugar de usar un ROV, atar una embarcación de apoyo de la ROV) Se consideró que los beneficios eran un error humano reductor. Facilitar los proyectos en alta mar, mantener al personal calificado en tierra y reducir costos y aumentar la seguridad.
El Remus no era el vehículo adecuado para las actividades en las que estaba involucrado Modus. Vino con un sonar de barrido lateral, pero los clientes querían la batimetría y, como muchos sistemas AUV, fue difícil actualizar el vehículo o cambiar los sensores para diferentes aplicaciones ", dice Ward. "En cualquier caso, los AUV existentes en el mercado no son realmente tan autónomos, a menudo el barco necesita rastrear el vehículo durante un alcance, lo que, en nuestra opinión, derrotó al objeto de la función autónoma".
 Imágenes: Modus Seabed Intervention
Imágenes: Modus Seabed Intervention
Entonces, Modus miró a Sabertooth de Saab Seaeye. “Es un cruce entre un ROV y un AUV. Queríamos los beneficios de ambos. La capacidad de montar una carga útil de sensor de levantamiento flexible rápida y fácilmente es fundamental para cumplir con los requisitos del cliente. Podemos contratar un sensor, integrarlo y listo.
En este momento se está desarrollando una gran cantidad de nuevas tecnologías de encuestas, por lo que queríamos asegurarnos de que pudiéramos utilizarla para probar el vehículo en el futuro.
"También queríamos poder volar como un ROV, tener la velocidad de un AUV y poder realizar operaciones verdaderamente autónomas, por lo que no tiene que dedicar un barco para perseguir el HAUV con un sistema de posicionamiento de línea de base ultra corto. . Sentimos que el Saab Sabertooth cumple con estos criterios.
“El vehículo se basa, en su paquete básico, en su IXBlue Phins3 INS y RDI workhorse DVL, con la adquisición de datos, la navegación y el procesamiento de datos de sensores gestionados por QINsy, que también incorpora los datos DGP de Novatel. Sin embargo, la carga útil es flexible y también podría funcionar dentro de arreglos de línea de base larga (LBL) o con un sistema USBL donde sea necesario, con un Sonardyne AvTrak 6, proporcionando un transductor, un transceptor y un enlace de telemetría en uno ", dice Ward.
En 2017, la compañía realizó demostraciones y ensayos y el HAUV estuvo listo para las operaciones comerciales en 2018. En uno de los proyectos de prueba en 2017, el HAUV se lanzó desde un muelle en un lago cercano a la instalación de Saab en Suecia para realizar una la encuesta preprogramada del estilo del césped recopila datos de MBES, SSS y SBP en una ruta de aproximadamente 15 km, sin ayuda externa de un barco de soporte (solo DGPS, INS y DVL del vehículo). "Habiendo salido y repetido la encuesta, se vio muy poco a la deriva", dice Ward. El vehículo también fue probado con éxito varias veces, atracando de forma autónoma en su garaje submarino. A principios de 2018, esta función se desarrolló aún más, como parte de un proyecto financiado por Innovate UK para la inspección de residentes de parques eólicos realizada. Esta prueba se realizó en la instalación de ORE Catapult en Blyth y también involucró el acoplamiento de potencia indirecto y la transferencia de datos utilizando un conector inductivo Blue Logic.
En la fase final de este proyecto demostrador financiado, más adelante este año, entre sus compromisos comerciales, la compañía probará un concepto híbrido de AUV residente en un parque eólico marino en el Reino Unido. El HAUV y su estación de acoplamiento se dejarán para una misión, similar a una demostración en las instalaciones de ORE en Blyth. En esta ocasión, no se conectará con ninguna de las infraestructuras del parque eólico. "Sin embargo, conectar la estación de acoplamiento a un parque eólico, acceder a la energía y las comunicaciones sería relativamente sencillo", dice Ward, "ya que ya existe la infraestructura de datos y energía disponible para trabajar en las turbinas que podemos aprovechar".
 Imágenes: Modus Seabed Intervention
Imágenes: Modus Seabed Intervention
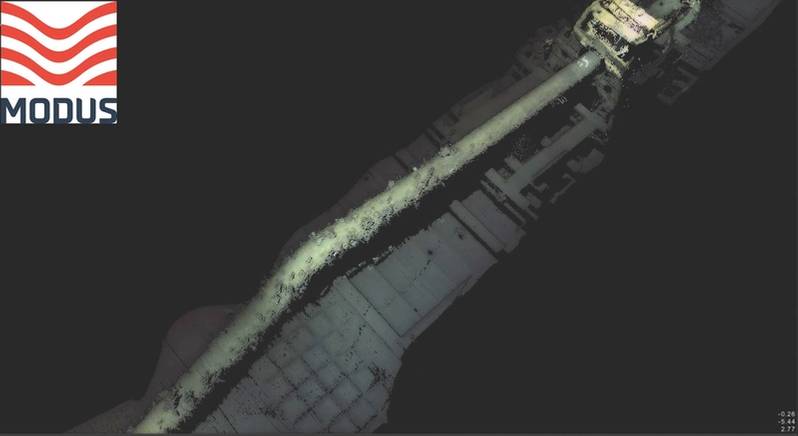
El año pasado, Modus desplegó un HAUV costa afuera del noroeste de Australia para realizar aproximadamente 240 km de encuesta de integridad de tubería, produciendo imágenes asombrosas, así como datos de nubes de puntos, tanto de la tubería como de la vida marina que pasa (vea el recuadro con detalles de los dientes del tiburón, tomados en 2knts) utilizando un perfil láser Cathx Scout y una imagen de alta definición con un ecosonda multihaz (MBES).
El tiempo de la encuesta fue la mitad de lo que hubiera tomado usar un ROV tradicional para realizar la encuesta y podría haber sido más rápido ", dice Ward. "Una encuesta de este tipo es posible sin una atadura, pero se realizó con una atadura en esta ocasión para poder recopilar datos en tiempo real".
Para la navegación, el vehículo usó la ayuda de USBL para seguir una lista de posición de ruta de los gráficos de la tubería según la construcción. Esto se puede combinar con el algoritmo de seguimiento autónomo de tuberías que utiliza los datos de perfil de tubería recopilados para que el MBES siga la ruta de la tubería. Esto es particularmente útil si la posición de construcción no es precisa, lo que puede deberse a una imprecisión causada por las tolerancias de posicionamiento. "Debido a estos sistemas, el AUV puede, en efecto, ver el gasoducto, lo que significa que la asistencia USBL no siempre es necesaria para realizar una inspección del ducto, lo que permite operaciones autónomas fuera de los buques de soporte", dice Ward. “El sistema láser CathX proporciona una nube de puntos de muy alta resolución de la tubería y el lecho marino adyacente. Las nubes de puntos de láser y MBES se combinaron en el procesamiento posterior y se utilizaron para evaluar la posición y las posibles franjas horarias. La muy alta resolución obtenida del sistema láser lo hace adecuado para la desviación de la bobina y otras encuestas de metrología basadas en fotogrametría ".
Debido a que el vehículo es estable, silencioso y puede volar a una altura constante por encima de la tubería, las imágenes y mediciones producidas a partir de nubes de puntos basadas en láser, unidas con las imágenes de la cámara HD, son muy precisas y fáciles de procesar.
Uno de los mercados a los que se dirige Modus es la eólica marina. Los campos de arrays de turbinas a menudo se encuentran en áreas de alta corriente, por lo que en 2017 la empresa puso a prueba su HAUV en una planta hidroeléctrica en Suecia, donde el vehículo con capacidad de 4.5kt demostró su capacidad para mantener la posición y maniobrar con éxito en 3kts de corriente. En los sitios eólicos marinos, a menudo hay barcos de servicio de caminata al trabajo desplegados en el campo para actividades de mantenimiento, que son efectivamente barcos de hoteles con mucho tiempo redundante. Hemos desarrollado HAUV para poder ser desplegados y recuperados de estos buques, lo que reemplaza la necesidad de movilizar un buque ROV para realizar actividades de inspección. Hace que el buque de servicio sea más valioso.
Para Modus, no se trata solo de inspección visual. La compañía también ha estado probando el sistema FIGs de Force Technology, que puede realizar encuestas de protección catódica sin contacto en 4 nudos, al mismo tiempo que realiza una encuesta GVI.
"Saab ha diseñado un robusto vehículo submarino y lo hemos desarrollado aún más para que pueda ser operado como un vehículo de inspección y reconocimiento líder en su clase", dice Ward. “Nos hemos centrado en cómo se integran los sensores, cómo se comunican entre sí, el software de la misión y ahora nos estamos moviendo hacia la inteligencia artificial y las capacidades de aprendizaje automático. Ya podemos decir 've aquí, si ves una tubería, síguela o si ves un monopilo, realiza una inspección alrededor de su circunferencia'. Todo esto se ha demostrado en los juicios. El próximo conjunto de desarrollos autónomos será muy emocionante. A corto plazo, queremos desarrollar la pista de HAUV y realizar una encuesta de los cables enterrados de forma autónoma. Actualmente se están probando varias tecnologías de seguimiento de tuberías. Se espera que esto sea un desarrollo rápido, ya que podemos usar algoritmos similares a los utilizados para rastrear tuberías visibles ”.
No ha sido un viaje fácil, pero Ward ve que algunos están viendo el potencial. "No hay duda de que hemos enfrentado desafíos para llevar esta tecnología al mercado", dice. “Principalmente, muchas compañías desean continuar haciendo las operaciones como siempre lo han hecho, por ejemplo, algunos operadores aún especifican cámaras de brazo y de ROV para la inspección de tuberías. Pero aquellos clientes que han adoptado este HAUV, que requieren un enfoque ligeramente diferente para abordar GVI, han cosechado los beneficios del ahorro de costos y la mejora de la calidad de los datos.
"HAUV ha estado operando comercialmente durante casi un año, tiene un historial en crecimiento y estamos muy entusiasmados con las optimizaciones y características adicionales que planeamos poner en marcha en los próximos meses, además de dar la bienvenida a nuestro segundo HAUV a la flota. dentro de unos meses ".
KIMM descifra el código para la predicción del ruido radiado submarino
")
Blueye: Haciendo que un ROV sea autónomo

Se ha demostrado que la contaminación lumínica afecta negativamente a algunos organismos marinos estáticos

Teledyne Marine organizará la conferencia de usuarios del planeador Slocum

Lander Lab: Criterios de selección para cables y conectores submarinos

Saliendo del frío: la seguridad en el Ártico canadiense cobra protagonismo
 como parte de la Operación NANOOK-NUNALIVUT en Inuvik, Territorios del Noroeste. Crédito: Cabo Jacob Hanlon, Foto de las Fuerzas Canadienses.")
El príncipe Guillermo del Reino Unido pide medidas urgentes para proteger los océanos

Saildrone y Meta completan el primer estudio autónomo y no tripulado de rutas de cables en aguas profundas en el Atlántico Norte

NOC recibe 3,5 millones de dólares para explorar la expansión de la desertificación oceánica

El RSV Nuyina completa un viaje dedicado a las ciencias marinas para el Programa Antártico Australiano

Los satélites ayudan al NOC a rastrear los cambios de mareas para operaciones portuarias más seguras
-160042 "Científicos del Centro Nacional de Oceanografía (NOC) del Reino Unido en Liverpool han utilizado datos satelitales para crear una perspectiva única del icónico río Mersey que ayudará a los operadores portuarios a gestionar de forma más inteligente los complejos canales de navegación. Crédito: NOC")
Un nuevo enfoque para estudiar el flujo aire-mar
