Selección de motores eléctricos para vehículos submarinos: consideraciones de eficiencia de carga parcial
Es fácil apreciar por qué los motores síncronos de imanes permanentes (PMSM) son populares para su uso en vehículos submarinos (UV). Son compactos y eficientes con una alta densidad de potencia. Quizás lo más importante es que permiten una operación efectiva en un amplio rango de RPM, lo que es beneficioso para vehículos con múltiples condiciones de operación. Dicho esto, encontramos que los desarrolladores de productos para vehículos a menudo no están seguros de la "eficiencia" de un motor. Este artículo ofrece algunos comentarios desde la perspectiva de un diseñador de hélices, desarrollando los componentes que ponen la carga en el motor de un UV.
Primero debemos comenzar con una descripción del "sistema", que está compuesto por el Vehículo (que establece el requisito de empuje), un Propulsor (típicamente una hélice abierta o con conductos que crea el empuje necesario) y el Drive (ese motor principal). cuyo único trabajo es hacer girar el Propulsor a sus RPM necesarias). Si envolvemos el sistema en una unidad conceptual, el beneficio del sistema es la velocidad del vehículo (o empuje, en el caso de una aplicación de remolque) mientras que el costo del sistema es el "consumo de combustible". Para sistemas impulsados por motores de combustión interna, el costo es el consumo de fuel oil, digamos, en unidades de litros por hora. Los fabricantes de motores generalmente brindan suficiente información sobre el consumo de combustible en el rango de potencia y RPM del motor para que podamos predecir de manera confiable el uso de combustible para cualquier aplicación. Un gráfico de esta distribución a menudo se denomina "mapa de combustible", pero permítame que lo considere como un "mapa de eficiencia" de energía de salida a entrada.
Desafortunadamente, tenemos una circunstancia completamente diferente cuando usamos unidades PMSM. Puede surgir confusión porque el beneficio generado por el motor y el combustible utilizado por el motor comparten el término "potencia": uno es la potencia del eje mecánico de salida (que impulsa el propulsor) y el otro es la potencia eléctrica de entrada (una función del voltaje). y la corriente suministrada por el controlador). La relación de los dos es la "eficiencia del motor". Conocer la eficiencia correcta del motor en todas las RPM y cargas es fundamental para el diseño y análisis exitosos del sistema. Si bien la mayoría de las pruebas de los desarrolladores registran la potencia eléctrica, necesitamos conocer la potencia del eje para comprender el rendimiento general del sistema.
Si bien la curva de motor publicada por un fabricante indica el límite de par (y, por lo tanto, de potencia) en todo el rango de RPM, con frecuencia solo indican la eficiencia mecánica a eléctrica en un único punto de diseño o en el límite de par. A diferencia de lo que está disponible de los proveedores de motores, rara vez tenemos un "mapa de eficiencia" completo de potencia mecánica a eléctrica en el rango útil de RPM y carga de potencia del eje para PMSM. Para obtener estos datos, algunos de nuestros clientes hacen probar sus motores en pequeños dinamómetros para generar un mapa de eficiencia. Sin embargo, esto puede ser costoso y llevar mucho tiempo, y un ejercicio potencialmente desperdiciado durante el diseño de etapa inicial donde existe la duda de si se seleccionará el motor.
¿Cuáles son las fuentes de pérdida de eficiencia para los PMSM? La explicación es una mezcla complicada de términos como resistencia de devanado, fricción mecánica e incluso efectos de flujo magnético. Entonces, simplifiquemos un poco con algunas generalizaciones usando términos amplios de: potencia del eje de carga mecánica (PS), eficiencia (EFF), RPM y pérdidas de potencia (LOSS).
• La eficiencia del motor se define como EFF = PS / (PS+LOSS).
• Para simplificar, podemos decir que las pérdidas son de dos tipos: dependientes de la carga de potencia o dependientes de las RPM.
• Las pérdidas (no la eficiencia, sino las pérdidas) tienden a ser proporcionales a) a las RPM yb) al cuadrado de la potencia.
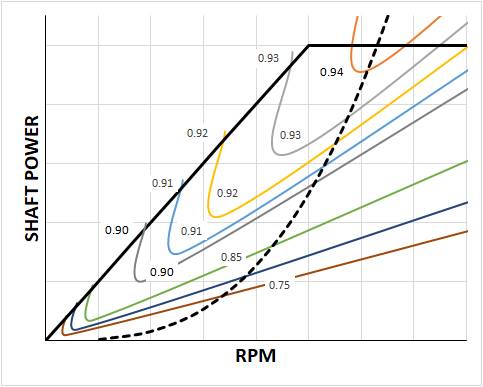
En las gráficas siguientes se muestra un mapa de eficiencia representativo genérico para un PMSM de “par constante, potencia constante”. Es nuestra práctica convertir siempre un gráfico "basado en el par" en uno "basado en la potencia", ya que creemos que la potencia es una mejor manera de comunicar la generación y transmisión de energía para vehículos y propulsores. La línea negra continua representa la curva límite del motor, la línea discontinua es una curva de demanda genérica del propulsor y las líneas de colores son cifras de mapas de eficiencia de muestra.
A partir de este gráfico, podemos ver cómo el funcionamiento a carga parcial influye en la eficiencia del motor. Existe un amplio rango de RPM que mantiene una alta eficiencia, ya que casi la mitad del rango superior de RPM se encuentra dentro de un par por ciento de la eficiencia máxima del motor, siempre que el motor genere aproximadamente el 80 % de su potencia nominal. En términos de operación del vehículo, a máxima velocidad la eficiencia es máxima, alcanzando el 95%. A una velocidad del 75 %, la demanda de energía es del 40 % al 45 % y la eficiencia cae al 85 % al 90 %. A una velocidad del 50 %, se necesita poca energía y la eficiencia del motor puede caer a menos del 75 %.
(Recuerde, estas son cifras genéricas utilizadas aquí para representar un concepto. Las eficiencias reales variarán de un modelo a otro).
Entonces, déjame dejarte con algunas observaciones básicas:
• La eficiencia potencial máxima de un PMSM varía según el tamaño del motor; los motores de mayor potencia ofrecen potencial para mayores eficiencias. Por ejemplo, un PMSM de 20 kW puede tener eficiencias máximas de motor superiores al 95 % a plena carga, mientras que un motor de menos de 1 kW suele alcanzar solo el 90 %.
• Como se indicó anteriormente, aunque la eficiencia varía con las RPM, debe haber un rango bastante amplio de RPM que mantenga una alta eficiencia para la mayoría de las aplicaciones que requieren carga completa o casi completa.
• La carga de potencia parcial es el gran problema para la mayoría de las aplicaciones, ya que hacer funcionar un motor a baja potencia puede causar una caída significativa en la eficiencia del motor. Por ejemplo, la eficiencia del motor puede caer a menos del 70 % para la potencia del eje fraccional.
Los motores eléctricos, en particular los PMSM, son un enfoque importante de nuestro trabajo de desarrollo para NavCad en 2020. Estamos trabajando para simplificar la definición de estas unidades en NavCad con energía eléctrica como el "combustible" y formas de curvas de motor genéricas (como "constante- torque, potencia constante”) para el diseño de etapa temprana. Y, por supuesto, estamos metidos en un modelo de predicción para mapas de eficiencia de carga parcial fuera del diseño.
Lea esta historia en la edición de marzo de 2020 de Marine Technology Reporter: https://magazines.marinelink.com/nwm/MarineTechnology/202003/#page/20
El polvo de la sequía en Sudáfrica provocó una floración oceánica récord

Dándole una mano robótica a los océanos
")
NOC: Los científicos resuelven un viejo y frío enigma anómalo

... Y el ganador es...
, 2023 / Imagen cortesía de Teledyne Marine")
Rusia en la mira por los cortes de cables submarinos

Sabotaje: Dos cables submarinos cortados en el mar Báltico

Kraken demuestra el sistema autónomo de lanzamiento y recuperación KATFISH para clientes de la Armada
")
China se apodera de “faros” submarinos

MBARI nombra presidente y director ejecutivo a Antje Boetius
-153968 "Antje Boetius (Foto: MBARI)")
Singapur refuerza su poderío submarino con dos nuevos submarinos
-153498 "(Foto: MINDEF Singapur)")
El gobierno de Holanda ayuda a impulsar un clúster regional de energía marítima, marina y submarina
Greensea IQ se asocia con WHOI para impulsar tecnologías de investigación oceánica
")