Robótica: la próxima generación en vehículos submarinos

El concepto MUM de Thyssenkrupp. Imagen de Thyssenkrupp.

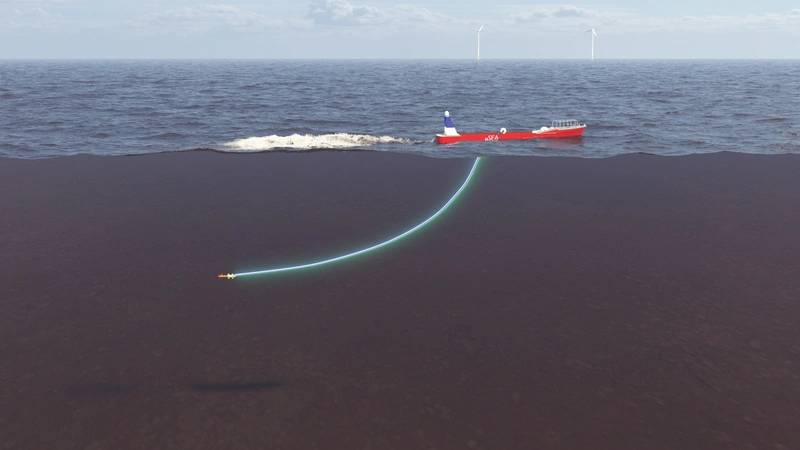
Drone de superficie uLARS de uSEA. Imágenes de uSEA.
MUMs (e hijas) de la invención: las ninfas de mar y MUM están inspirando a una nueva generación de sistemas y vehículos subacuáticos. Elaine Maslin echa un vistazo.
La lista de solicitantes para ingresar al dominio subacuático está creciendo rápidamente. Los conceptos varían, desde naves nodrizas autónomas bajo el agua capaces de transportar una gran variedad de cargas útiles a largas distancias hasta enjambres de nodos del fondo oceánico desplegados que pueden encontrar su camino a ubicaciones preprogramadas.
En cuanto a energía: conectado, como se llama ahora el grupo y la conferencia anual Subsea Valley, con sede en Oslo, se resumieron algunos de estos conceptos, incluidos los de dos empresas tecnológicas noruegas y la alemana Thyssenkrupp, una firma más acostumbrada al diseño de sistemas submarinos navales.
uSEA desvela uLARS
Uno, el arranque de la tecnología noruega uSEA, propone un sistema híbrido para interrumpir las operaciones submarinas soportadas por buques tripulados existentes a través de una combinación de submarinos y drones de superficie.
uSEA se fundó en 2017 y desde entonces ha estado desarrollando un avión no tripulado de superficie, o un buque de superficie no tripulado (USV), para soportar drones submarinos (es decir, vehículos submarinos autónomos o AUV), por lo que los buques tripulados ya no son necesarios y la recarga de la batería puede ser Realizado en el agua, evitando operaciones de lanzamiento y recuperación. Esto lo hace diferente a otros conceptos de aviones no tripulados de superficie, que tienden a depender de la recuperación total de la AUV o del vehículo de operación remota (ROV) para la recarga. El sistema de uSEA se llama uLARS (LARS significa sistema de lanzamiento y recuperación) para drones submarinos, dice el gerente general de uSEA, Felipe Lima, quien sirvió en la Marina de Brasil antes de trabajar en Subsea 7, Aker Solutions y Xodus Group.
Es una progresión natural. Los AUV de hoy son cada vez más capaces y confiables, dice Lima. "Están tomando el espacio que ha sido el patio trasero de ROVs. Pero, tienen una limitación; dependen de las baterías, porque no están cableadas como ROV, y todavía necesitan una nave nodriza, por ejemplo. Un buque de reconocimiento, porque sus baterías se agotan en 12-48 horas. Con una estación de acoplamiento móvil para el AUV, no depende de una estación de acoplamiento en el fondo marino y no necesita una embarcación de superficie más grande ".
 Interfaz de acoplamiento submarino uLARS de uSEA (Imagen: uSEA)
Interfaz de acoplamiento submarino uLARS de uSEA (Imagen: uSEA)
El sistema incluye un cabezal de remolque sumergible, con un conector inductivo para la carga y la transferencia de datos, que actúa un poco como un reabastecimiento de combustible de aviones de combate. "Esto significa que hay un impacto mínimo de las olas porque el acoplamiento está a una profundidad controlada", dice Lima, quien tiene una maestría en ingeniería submarina de la Universidad de Aberdeen y una maestría en innovación y emprendimiento de la Universidad de Oslo. También hay un sistema de manejo basado en la piscina a través de la luna para recuperar el AUV en la cubierta, de manera segura.
El sistema admitirá levantamientos submarinos en aguas poco profundas, así como en aguas profundas y ultra profundas, operando una amplia variedad de cargas útiles que van desde los tipos más convencionales, como sonar de barrido lateral y ecosondas multihaz, hasta más avanzados, como el sonar de apertura sintética.
uSEA está buscando socios para completar el programa de calificación, que se espera para fines del próximo año (2020). Después de eso, la compañía está apuntando a las operaciones en el mar y está buscando proyectos piloto para llevar a cabo en 2021.
Un iDROP en el océano
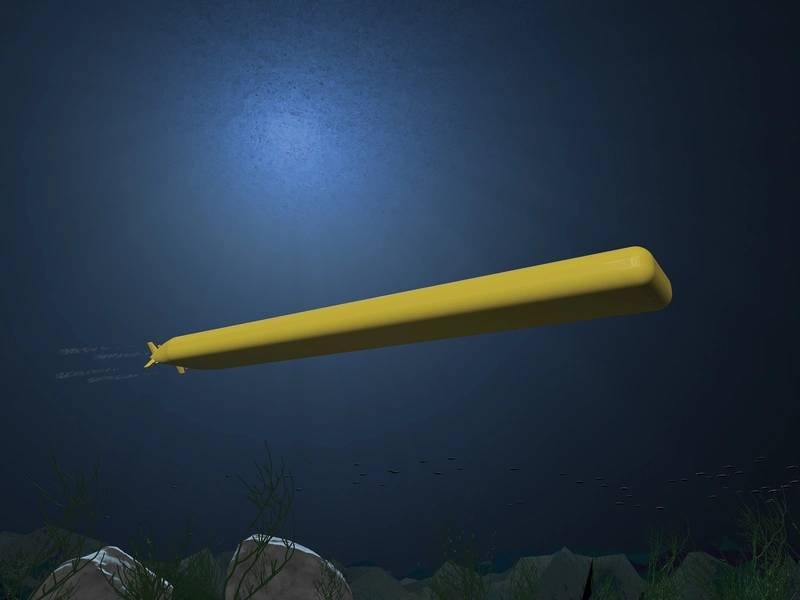
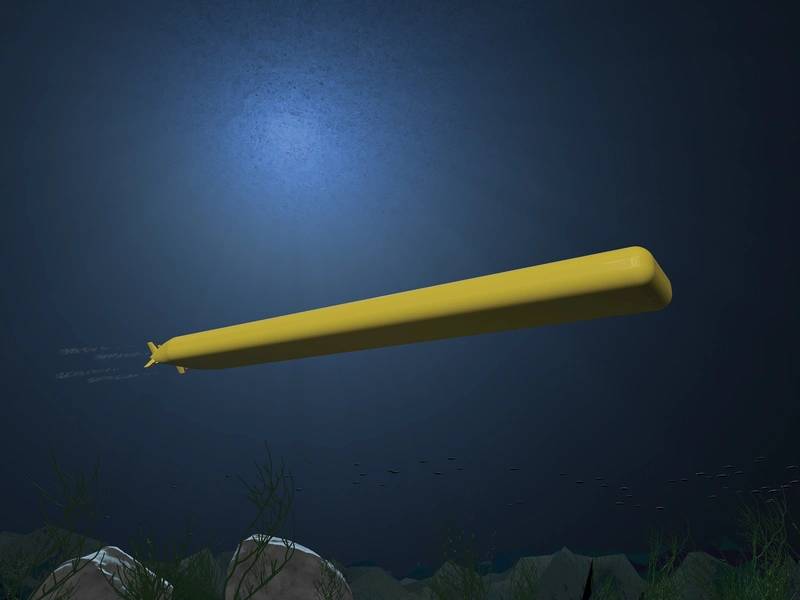
Otra firma de tecnología noruega, iDROP, está planeando interrumpir el mercado de la tecnología sísmica de los fondos marinos con sus nodos Oceanid autónomos. El sistema de iDROP se basa en nodos sensores cilíndricos individuales (llamados así por las ninfas marinas griegas) que se despliegan, utilizando la gravedad y el cambio de lastre para propulsión y control de posición, para aterrizar en posiciones específicas planificadas previamente en el fondo marino donde aterrizan sobre patas de aluminio que saltar antes de que aterricen.
 Un Oceanid de un iDROP. En la mitología griega, los océanos son ninfas que fueron las 3000 hijas de los Titans Oceanus y Tethys. (Imagen: iDROP)
Un Oceanid de un iDROP. En la mitología griega, los océanos son ninfas que fueron las 3000 hijas de los Titans Oceanus y Tethys. (Imagen: iDROP)
La idea es que se puedan desplegar en grupos, cayendo para formar patrones de cuadrícula en el fondo marino para estudios sísmicos. Las baterías a bordo alimentan el control de descenso (usando solo el 5% de la batería), la recolección de datos (durante 180 días) y activan un mecanismo que libera el lastre de 30 kg, hecho de lodo de sal, lo que permite que las unidades vuelvan a deslizarse a la superficie. Una vez más, bajo control por lo que apuntan hacia un objetivo esperado. Un sistema de superficie con una disposición de tipo de cinta transportadora flotante los recopilaría. "Hay una variedad de tecnologías de adquisición sísmica que se remolcan principalmente", dice Kyrre J Tjøm, fundador y CEO de iDrop, que anteriormente trabajó en Schlumberger y consultó para Soluciones Geo Equinor y Fondos Marinos. “También hay nodos que se colocan en el fondo marino por un ROV. Hay otros donde los tiras por el lado con lastre de concreto y algunas alternativas propulsadas. Nuestro sistema eliminará la necesidad de grandes embarcaciones especializadas con maquinaria de manejo pesado y operaciones de ROV que consumen mucho tiempo ".
Los grupos de Oceanids pueden desplegarse rápidamente y la granularidad del punto sensor (es decir, la cobertura del área y, por lo tanto, la cantidad de datos que se pueden recuperar) puede aumentar, dice. Esto es gracias a la capacidad de desplazamiento lateral autónomo vertical de 69 grados, con cada nodo "cayendo" a una posición preestablecida. "Si desea implementar un sensor en una profundidad de agua de 1200 m, puede alejarse a 2 km de la embarcación de superficie e instalar un parche de sensores, en lugar de una línea", dice.
Los lotes de nueve nodos, cada uno con un módem inductivo, un transpondedor y una carga útil de sensor sísmico, podrían implementarse en 15 minutos, lo que supone un ahorro de tiempo de 10 veces en comparación con los métodos establecidos, dice Tjøm. Un gemelo digital, basado en el modelado y las pruebas extendidas, se usaría para ayudar a identificar cualquier impacto ambiental, por ejemplo. Las olas, la corriente, la profundidad, etc., y por lo tanto, permiten el control del descenso.
"Estamos buscando revolucionar la forma en que los nodos del fondo del océano se instalan en el fondo marino", dice Tjøm. “Los competidores hacen 40-170 por día y necesitan dos ROV, sistemas de manejo de nodos controlados por DP, una gran embarcación y una tripulación especializada. Cuanto más se profundiza, los ROV son más lentos, ya que necesitan más empuje para empujar el cordón umbilical. Haríamos algo menos de 1000 por día con una tripulación marina estándar ".
Se ha puesto mucho trabajo en el proyecto Oceanids entre bastidores y es solo ahora que se está promoviendo la tecnología. De hecho, el proyecto comenzó en 2010, con un prototipo construido en 2013/14. iDROP también ha desarrollado un sistema de recuperación y ha realizado una prueba de bajura para verificar el sistema de recuperación. Una segunda prueba piloto, la adquisición de datos sísmicos 3D, en aguas profundas, está prevista para este año en el Mar del Norte. Se han fabricado nueve vehículos que debían ir a la costa para realizar pruebas en el primer semestre, y se planea construir más en el próximo año.
Mamá es la palabra
Thyssenkrupp Marine Systems (MS), parte del conglomerado industrial alemán, está trabajando en una escala diferente tanto para uSEA como para uLARS. La firma está diseñando un vehículo subacuático no tripulado (UUV) muy grande (hasta 50 m de largo), denominado nave nodriza subacuática modificable (MUM), basado en un diseño modular, que comprende módulos básicos y de misión.
La idea detrás de esto es que el mercado de vehículos submarinos submarinos de hoy en día está dominado por productos especializados, y ningún vehículo puede usarse para múltiples tareas. Entonces, Thyssenkrupp comenzó a diseñar un sistema modular, dice Willem Hendrik Wehner, quien supervisa el proyecto en Thyssenkrupp MS.
 El concepto MUM de Thyssenkrupp (Imagen: Thyssenkrupp)
El concepto MUM de Thyssenkrupp (Imagen: Thyssenkrupp)
Los módulos básicos serían sistemas de ajuste y buceo, batería, propulsión y una celda de combustible de hidrógeno. Luego, los módulos enfocados en la misión podrían abarcar desde el despliegue del nodo sísmico del fondo oceánico (OBN) (> 1000 OBNs) hasta los sistemas de perforación central, o desde el cambio del módulo de control submarino hasta el alojamiento de vehículos operados por control remoto, que utilizarían el gran UUV como nave nodriza. Un kit modular MUM consistiría en módulos que tienen el tamaño de contenedores estándar de 20 pies o 10 pies. Se pueden combinar de acuerdo con las especificaciones de la misión, lo que da como resultado vehículos muy diferentes, desde 80 toneladas métricas hasta más de 300 toneladas métricas, o desde 20 m de largo, 4 m de ancho y 3 m de alto hasta aproximadamente 50 m de largo, 7 m de ancho y 3 m. Alto, con consumo de energía dependiente de la carga útil y velocidad de propulsión.
"Otros vehículos submarinos tienen enfoques modulares, pero principalmente en términos de una adaptación de la sección de carga útil o la extensión de la resistencia al agregar más capacidad de energía", dice Wehner. "Un buen ejemplo es el SeaCat AUV de ATLAS, que puede cambiar su carga útil al cambiar la cabeza del vehículo y puede ampliar el rango agregando más capacidad de la batería".
Wehner dice que el vehículo MUM podría viajar cientos de millas, dependiendo de la configuración del vehículo, con su potencia de celda de combustible de hidrógeno de 80-160kW, y hasta miles de metros de profundidad de agua. “El rango submarino es escalable y en la región de 100s de millas náuticas; Completamente suficiente para los casos de uso actuales ", dice. “Nuestro sistema de almacenamiento de gas para la celda de combustible es aproximadamente tres veces superior a las baterías con respecto a la energía por volumen y aún más con respecto al peso. Sin embargo, si desea cubrir más de 1000 millas náuticas, le recomendamos un tránsito cerca de la superficie con un enfoque más convencional, por ejemplo, diesel-eléctrico. El concepto lo permite.
Las celdas de combustible de hidrógeno son una tecnología probada independiente del aire para los submarinos Thyssenkrupp; La compañía tiene una amplia experiencia con las pilas de combustible de hidrógeno en el submarino alemán HDW Clase 212A y en otros submarinos. Las baterías pueden ser necesarias para las cargas máximas de algunas cargas útiles, pero la mayoría de los diseños actuales de vehículos MUM solo tienen una batería de respaldo / emergencia de tamaño pequeño, dice Thyssenkrupp. Se está diseñando un módulo para el tránsito en superficie o cerca de la superficie en este momento, ya que el sistema de celda de combustible tiene sus fortalezas para soportar tareas bajo el agua.
Para comunicaciones de largo alcance, en misiones largas, Thyssenkrupp MS busca usar módems autopropulsados o nodos de comunicación autónomos, con capacidad de transmisión de datos bidireccional, para crear comunicaciones acústicas de largo alcance a través de una cadena de estos nodos, así como Navegación local o posicionamiento 3D a través de módems USBL. Estos están siendo desarrollados bajo un subproyecto llamado NaviMUM por EvoLogics y se desplegarían desde una revista de revólver en el MUM.
EvoLogics llama al concepto una red subacuática móvil auto-organizable, con los nodos que forman estaciones de retransmisión, además de proporcionar posicionamiento. Se desplegarían de forma autónoma en un área de la misión, analizarían el entorno de comunicación, luego mantendrían la posición e interconectarán para formar una red submarina flexible. Algunos tendrían un receptor GNSS, para obtener arreglos periódicos de posición real, dice Wehner.
"Los vehículos muy grandes, como el MUM, en particular, necesitan sensores y algoritmos sólidos para evitar obstáculos de forma autónoma y volver a planificar las rutas", dice Thyssenkrupp. “Los algoritmos de control autoajustables que reflejan la gran variedad de configuraciones posibles del vehículo apoyarán el concepto del vehículo. El proyecto desarrolla un sistema de comunicación y navegación móvil con módems LBL / USBL autopropulsados que pueden establecer una red y un muelle en el vehículo MUM para el tránsito y la carga ".
Thyssenkrupp MS está construyendo una versión a pequeña escala del MUM, de 5 m de largo, que estará lista para pruebas este verano (2019). Muchos de los conceptos, en particular el software de autonomía y las comunicaciones móviles, se probarán en este sistema. Este año también se probarán, en tamaño real, las tecnologías principales como la nueva celda de combustible de hidrógeno y un nuevo diseño de casco de presión.
Se debe construir un vehículo MUM a escala real a partir de 2020, con pruebas y ensayos hasta 2023-24. El desarrollo está siendo apoyado por un panel asesor de la industria de petróleo y gas que incluye al operador Equinor, la compañía sísmica PGS y el contratista submarino Boskalis.
La compañía también cuenta con ATLAS ELEKTRONIK, la Universidad Técnica de Berlín y la Universidad de Rostock trabajando en el proyecto, en el sistema de control y la simulación del sistema, respectivamente.
Seguridad de puertos integrada y multidominio
-Ocean-169807 "El vehículo autónomo de superficie y submarino (AUSV) Triton de Ocean Aero fue adquirido por el Puerto de Gulfport el año pasado. Crédito: Ocean Aero")
MTR100: Perfiles de líderes en el sector submarino - ¡Presenta tu solicitud hoy mismo!

Lamprell obtiene acuerdo con ONGC para proyecto de reemplazo de tubería submarina

El atraque automático como tecnología facilitadora de la autonomía operativa de los sistemas submarinos

Perspectiva brillante: láseres azules para las profundidades marinas

Impulsando las fronteras más profundas: Elección de baterías de litio para vehículos submarinos extremos

Oceanología Internacional 2026 presenta el nuevo enfoque COAST

Expectativas crecientes: Un análisis profundo de los vehículos submarinos




")